ロボット システム インテグレーション事業
- HOME
- 事業紹介
- ロボット システム インテグレーション事業
- 自動化実例紹介
- フレームカバー加工ライン
自動化実例紹介フレームカバー加工ライン
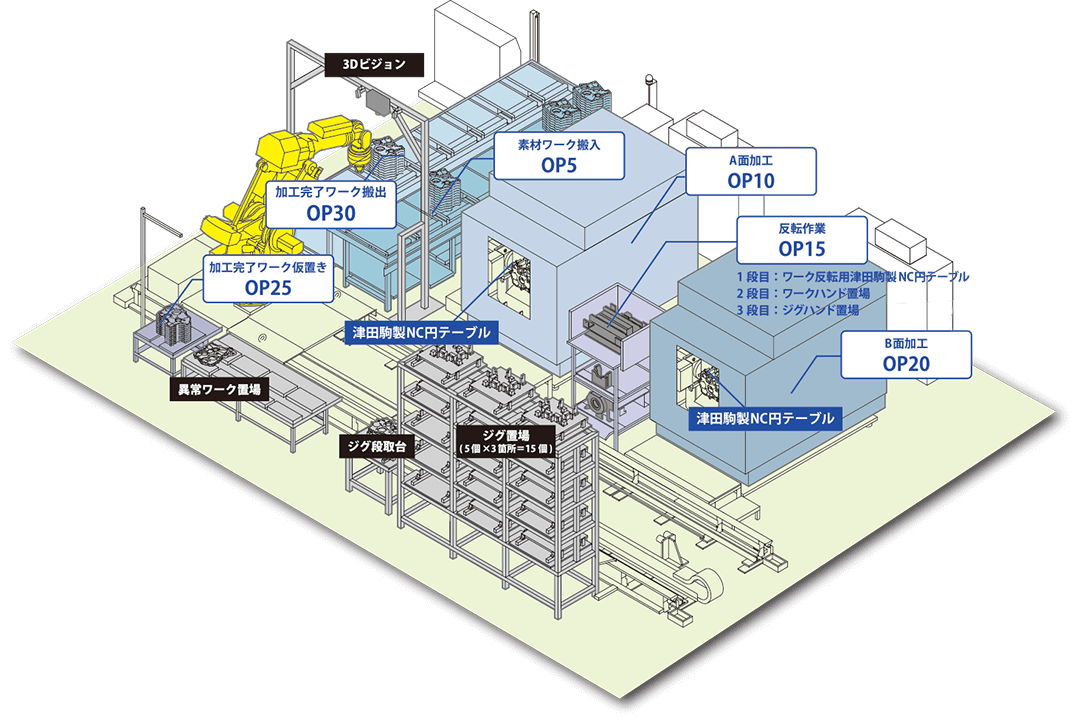
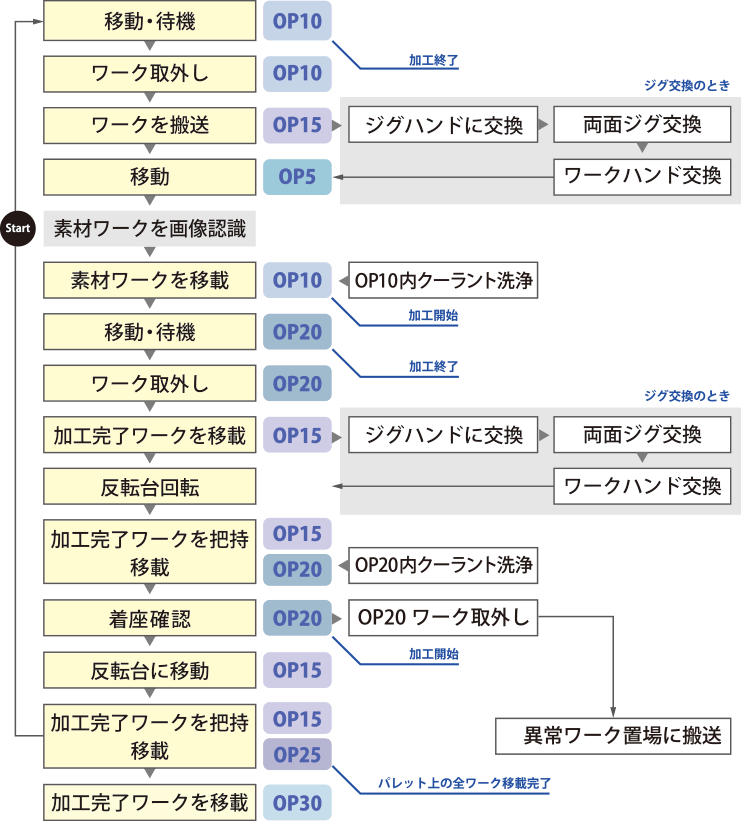
パレットチェンジャー付きMC2台の加工ラインにて、ロボット1台でワーク着脱、ワーク搬送、ジグ交換などの作業を行い、完全自動化ラインとしました。円テーブルを使ったジグ台のアイデアや、ワークストッカー、ジグストッカーを合わせた構成など、工作機械事業で培った経験と設計力を生かした津田駒TRIならではのシステムです。
特 長
ワーク・ジグを1台のロボットで搬送
走行軸上をロボットが移動可能で、ワーク搬送、着脱からジグ交換までの作業を1台で完結。ハンドチェンジにより、ワーク用ハンドとジグ用ハンドを自動交換します。専用のローダーが不要なため、コンパクトで制御を簡略化出来ました。
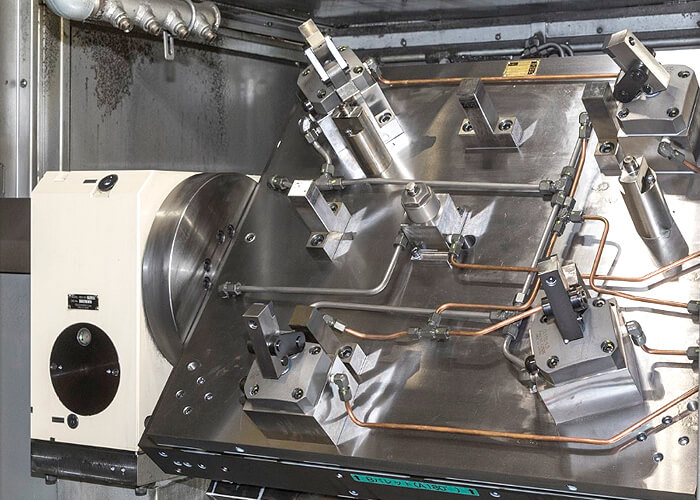
機内のジグ回転機構に円テーブルを採用
津田駒最新鋭のボールドライブ駆動円テーブルにてジグを回転させることで、ワークロード/アンロード時、ロボットのワーク受け渡し姿勢に自由度を確保し、MC側でロボットアーム干渉回避対策無しでロボットがアクセス出来るよう設計しました。両面ジグの回転割り出しの役割のほか、MC機内で高速回転、洗浄することで、別途洗浄装置も不要としました。